BioBot
 Biobot: Innovative Offloading of Astronauts for More Effective Exploration
Biobot: Innovative Offloading of Astronauts for More Effective Exploration
No parameter in the design of spacesuits for planetary exploration is more important than ‘weight on the back’- the weight of the suit system which must be supported by the wearer under the gravity of the Moon or Mars. The added weight of the spacesuit garment and portable life support system (PLSS) drives the required exertion level of the wearer, and ultimately sets limitations on EVA duration, distance traveled on foot, and productivity of the exploration mission.
As an example, the A7L-B suits worn on the later Apollo lunar missions had an Earth weight of 212 lbs, composed of 77 lbs for the garment assembly and 135 lbs for the PLSS. A 160 lb astronaut found their weight increased by 130% due to the suit, with the PLSS weight alone almost equal to his body weight. This system was capable of supporting a 6-hour nominal surface EVA, but strongly impacted the gaits, transport speeds, and energy expenditures of the astronauts. The PLSS weight was particularly burdensome, as it moved the astronaut’s overall center of mass upwards and backwards. This could be seen in the convoluted motions of the crew when trying to bend over and pick up items, work with the long-handled sampling tools, or just maintain balance, especially when changing direction or starting and stopping.
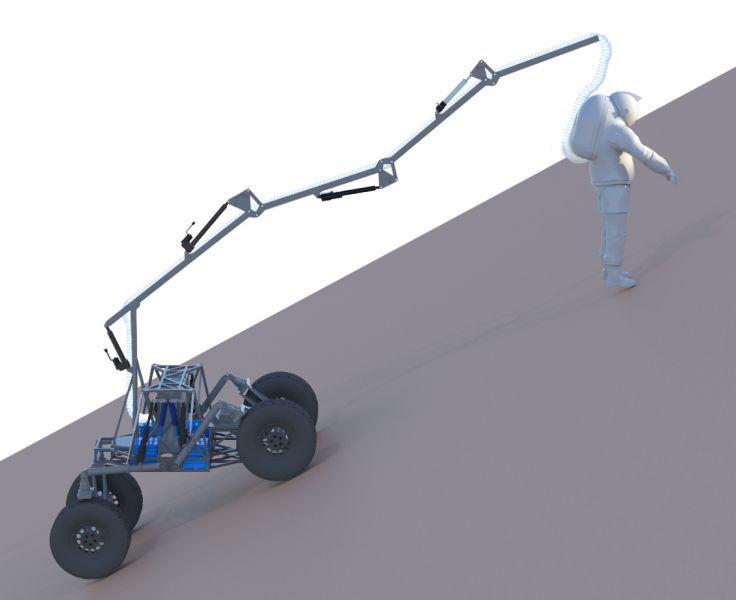
The seminal concept of BioBot is an autonomous robotic system to handle life support umbilicals on planetary surfaces in the vicinity of obstacles and snag hazards. This enables the BioBot system concept, which consists of a robotic rover which is capable of traversing the same terrain as a spacesuited human. It carries the primary life support system for the astronaut, including consumables, atmosphere revitalization systems (e.g., CO2 scrubbing, humidity and temperature management, ventilation fan), power system (e.g., battery, power management and distribution), and thermal control system (e.g., water sublimator, cooling water pump), along with umbilical lines to connect to the supported astronaut via the autonomous umbilical handling system.
Related Publications:
Project Advisor: Dr. David Akin
Lead Graduate Student(s): Charlie Hanner, Nic Bolatto, Rahul Vishnoi
Acknowledgements: The BioBot is development at the University of Maryland Space Systems Laboratory, part of the Aerospace Engineering Department and the A. James Clark School of Engineering. Funding is provided by a NASA Innovative Advanced Concept Phase I and II grant.