Ranger
 Ranger has been a cornerstone of the lab’s robotics research and development for years. Ranger is a series of robotics specifically designed to study satellite servicing.
Ranger has been a cornerstone of the lab’s robotics research and development for years. Ranger is a series of robotics specifically designed to study satellite servicing.
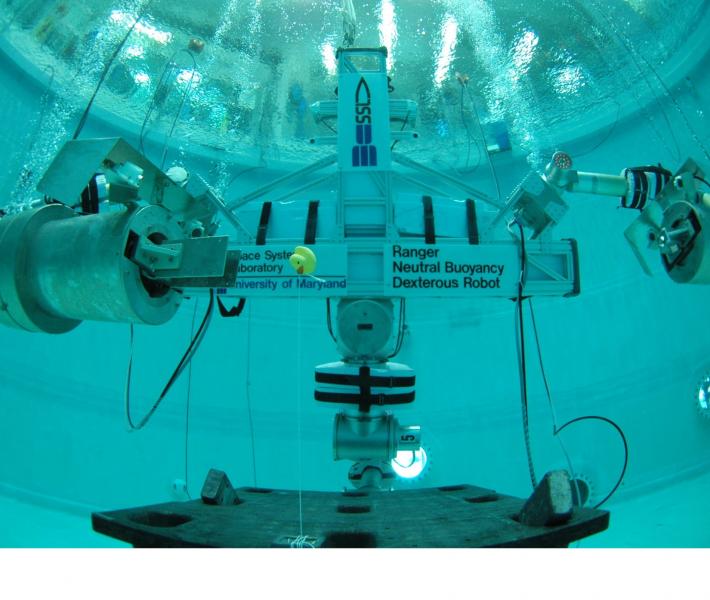
The current iteration of Ranger, known as Ranger RTSX or the Ranger Telerobotics Shuttle Experiment, consists of a pair of dexterous robotics arm mounted to a robotic positioning leg. Ranger RTSX is unique in that it is a flight-qualified robotic system which can operate unassisted in 1G and in neutral buoyancy, allowing Ranger to perform ground-based verification for other flight manipulators.
Originally aimed at a shuttle mission in the early 2000s, the Columbia accident in 2002 resulted in a lack of flight opportunities were available for this system. Since then it has become a highly capable laboratory research system. Ranger RTSX is unique in that it is a flight-qualified robotic system which can operate unassisted in 1G and in neutral buoyancy, allowing Ranger to be used to determine how robotics can best be utilized for space operations as well as perform ground-based verification for other flight manipulators.
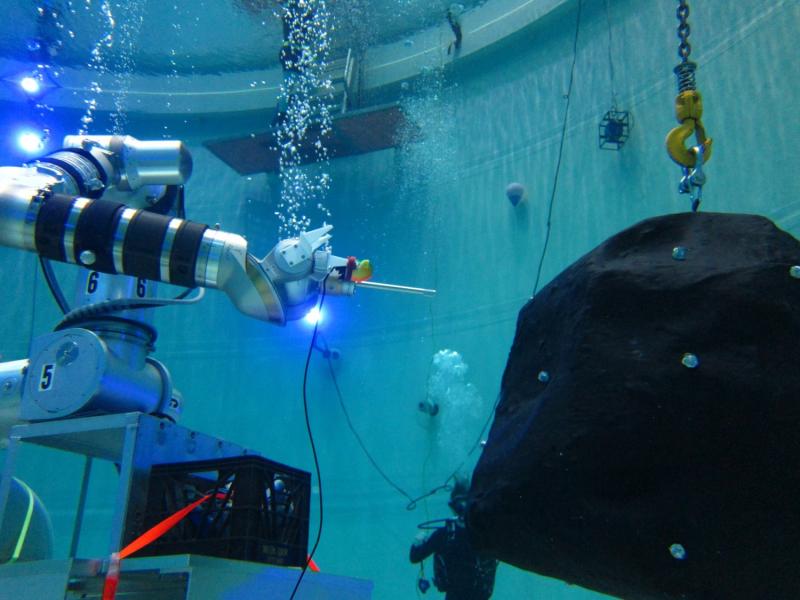 The Ranger system is currently a set of three reconfigurable robotic manipulators designed for either positioning or dexterous manipulation. The positioning manipulator, known as the positioning leg or PXL, is a large six degree-of-freedom (DOF) manipulator with an active braking system and extremely stiff joints. The positioning leg moves a pair of dexterous manipulators into a desired workspace pose and then locks the motor brakes to provide a rigid work structure for the arms. The dexterous manipulators, arbitrarily designated left (DXL) and right (DXR) despite being identical, are each eight degrees of freedom, with a kinematic design which minimizes joint offsets and provides simplified inverse kinematics. Used in combination, the positioning leg and the dexterous manipulators have a large workspace while maintaining precise dexterous manipulation.
The Ranger system is currently a set of three reconfigurable robotic manipulators designed for either positioning or dexterous manipulation. The positioning manipulator, known as the positioning leg or PXL, is a large six degree-of-freedom (DOF) manipulator with an active braking system and extremely stiff joints. The positioning leg moves a pair of dexterous manipulators into a desired workspace pose and then locks the motor brakes to provide a rigid work structure for the arms. The dexterous manipulators, arbitrarily designated left (DXL) and right (DXR) despite being identical, are each eight degrees of freedom, with a kinematic design which minimizes joint offsets and provides simplified inverse kinematics. Used in combination, the positioning leg and the dexterous manipulators have a large workspace while maintaining precise dexterous manipulation.
It has been determined that there would be a significant benefit in performing a major upgrade and modernization of the Ranger system, rather than continuing with the original instantiation. The Ranger upgrade program had three major objectives: (1) dramatically improve maintainability, (2) replace obsolete electronics with modern components, and (3) replace the custom software by maximizing use of modern open-source software. In so doing, the Ranger system will dramatically increase in availability, while taking advantage of the current highly robust manipulator hardware proven in thousands of hours of test operations in both the laboratory and underwater environments.
Background
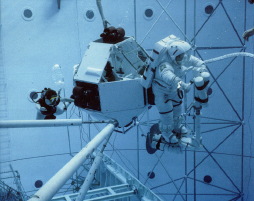
 The SSL was founded in 1976 at the Massachusetts Institute of Technology. Its early studies in space construction techniques eventually led to the EASE (Experimental Assembly of Structures in EVA) flight experiment which flew on Space Shuttle mission STS-61B in late 1985. EASE was designed to evaluate the ability of astronauts to build structures in space.
The SSL was founded in 1976 at the Massachusetts Institute of Technology. Its early studies in space construction techniques eventually led to the EASE (Experimental Assembly of Structures in EVA) flight experiment which flew on Space Shuttle mission STS-61B in late 1985. EASE was designed to evaluate the ability of astronauts to build structures in space.
The success of EASE led to questions about how well robots could construct structures in space. The SSL's first neutral buoyancy robot, the Beam Assembly Teleoperator (BAT), was built in 1983 specifically to construct the EASE structure. Over BAT's lifetime, SSL personnel accumulated a large database comparing human and robot performance in space. BAT also demonstrated the ability of robots to assist astronauts during EVA excursions and to service and repair satellites.
 Since 1983, the SSL built several robots, including the Multimode Proximity Operations Device (MPOD), an orbital manuevering vehicle or "space tugboat", and the Secondary Camera and Maneuvering Platform (SCAMP), a "floating eyeball".
Since 1983, the SSL built several robots, including the Multimode Proximity Operations Device (MPOD), an orbital manuevering vehicle or "space tugboat", and the Secondary Camera and Maneuvering Platform (SCAMP), a "floating eyeball".
In consideration of the rich heritage of robotic and free flying neutral buoyancy operations experience resident at the SSL, the decision was made to create a next generation robotic vehicle that captured the design and operations experience that had been gathered over the years. This new vehicle was not only intended to capture the knowledge of the past, but was to be flexible and capable enough to support the demands of real planned and unplanned future space operations. The new vehicle design was also to support an easy transition from the neutral buoyancy environment into actual space operations with minimal design changes.
 In answer to this challenge, work was started on the Ranger Neutral Buoyancy Vehicle. The manipulator configuration drew heavily on the previous years of robotic operations experience. The free flying base, along with the associated sensor and computer systems were designed to significantly enhance the neutral buoyancy simulation by increasing the quality of information available to the vehicle, along with the precision of the actuators. The power and pressurization systems were designed to significantly reduce the amount of time spent in routine vehicle maintenance, allowing more time for operations.
In answer to this challenge, work was started on the Ranger Neutral Buoyancy Vehicle. The manipulator configuration drew heavily on the previous years of robotic operations experience. The free flying base, along with the associated sensor and computer systems were designed to significantly enhance the neutral buoyancy simulation by increasing the quality of information available to the vehicle, along with the precision of the actuators. The power and pressurization systems were designed to significantly reduce the amount of time spent in routine vehicle maintenance, allowing more time for operations.
Individual subsystems were also designed to be more robust, which was to significantly reduce the amount of time spent on repairs. The vehicle was given an advanced buoyancy compensation system which would allow it to balance itself, which would allow more water time to be used for space simulation, and less for divers trimming vehicle buoyancy.
 One of the primary requirements of the Ranger NBV design was that the robotics package was to have roughly the same force and reach capability as an astronaut in a space suit. This requirement was set so that Ranger NBV would be capable of performing real tasks that were previously only planned for EVA. Another requirement was that it should be capable of full 6 DOF free flight. This allowed a much larger set of tasks to be considered, including large scale assembly tasks, and multi-stage repairs where many of the task elements could not be stored in the same locations in which they needed to be used. Additionally, the free flight system was to have precise position and attitude estimation and control. This capability would allow the neutral buoyancy simulation to be much more accurate because the advanced flight control system would enable the vehicle to mimic space flight dynamics.
One of the primary requirements of the Ranger NBV design was that the robotics package was to have roughly the same force and reach capability as an astronaut in a space suit. This requirement was set so that Ranger NBV would be capable of performing real tasks that were previously only planned for EVA. Another requirement was that it should be capable of full 6 DOF free flight. This allowed a much larger set of tasks to be considered, including large scale assembly tasks, and multi-stage repairs where many of the task elements could not be stored in the same locations in which they needed to be used. Additionally, the free flight system was to have precise position and attitude estimation and control. This capability would allow the neutral buoyancy simulation to be much more accurate because the advanced flight control system would enable the vehicle to mimic space flight dynamics.
 This would allow realistic training for proximity operations, along with final phase rendezvous and docking. This total system was designed to be a test bed and trainer for all aspects of large scale free flight and attached robotic space operations. It could also be used to demonstrate how operations performance capability is related to vehicle configuration. Operators could compare performance on the same task with various levels of vehicle capability. For example one task could be attempted using two arms, and then compared with the same task with the operator using only one arm. This same concept could be repeated with many different tasks, and vehicle systems, which would help to determine the value of each of them to a particular task element.
This would allow realistic training for proximity operations, along with final phase rendezvous and docking. This total system was designed to be a test bed and trainer for all aspects of large scale free flight and attached robotic space operations. It could also be used to demonstrate how operations performance capability is related to vehicle configuration. Operators could compare performance on the same task with various levels of vehicle capability. For example one task could be attempted using two arms, and then compared with the same task with the operator using only one arm. This same concept could be repeated with many different tasks, and vehicle systems, which would help to determine the value of each of them to a particular task element.
In addition to providing valuable insight into robotic operations, Ranger NBV was also to serve as a proving ground for the space robotic mechanical and electronic hardware. Complex drive trains often do not perform as originally intended. Only repeated operations reveal unexpected anomalies that are caused by component wear, and unexpected mechanical loads. Additionally, electronic power systems occasionally do not stand up to repeated high stress operations. Ranger NBV was to be used to help find and enhance any weak elements of the original design of these systems.
The ranger NBV has been the cornerstone of the lab’s robotics research and development for years. Ranger has a long history and continues to further promising autonomous robotics EASE reserach.